SLAM Implementation on Unitree Go2 Robot
Overview
This project focused on implementing SLAM on Unitree Go2 robots using ROS2 and the RTAB-Map package. It was a foundational step as it allows for developing more complex robotic applications. SLAM is successfully activated in two different configurations:
- Using Lidar data only
- Using a fusion of Lidar and RGB-Camera. The video below shows the successful implementation of the project.
Hardware Configuration
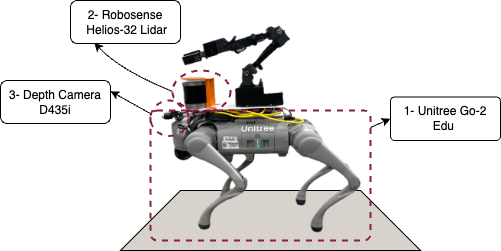
The robot platform used for this project consists of:
- Unitree Go2 Edu equipped with an NVIDIA Jetson Nano
- RoboSense RS-Helios-32 Lidar sensor for 3D point cloud generation
- Intel RealSense D435i RGB-D camera for visual data
The image below shows the robot and its attachments.
Software Environment
SLAM implementation was tested and verified on:
- ROS2 Foxy
- Ubuntu 20.04 LTS
Implementation Process
1. Activating Lidar Data
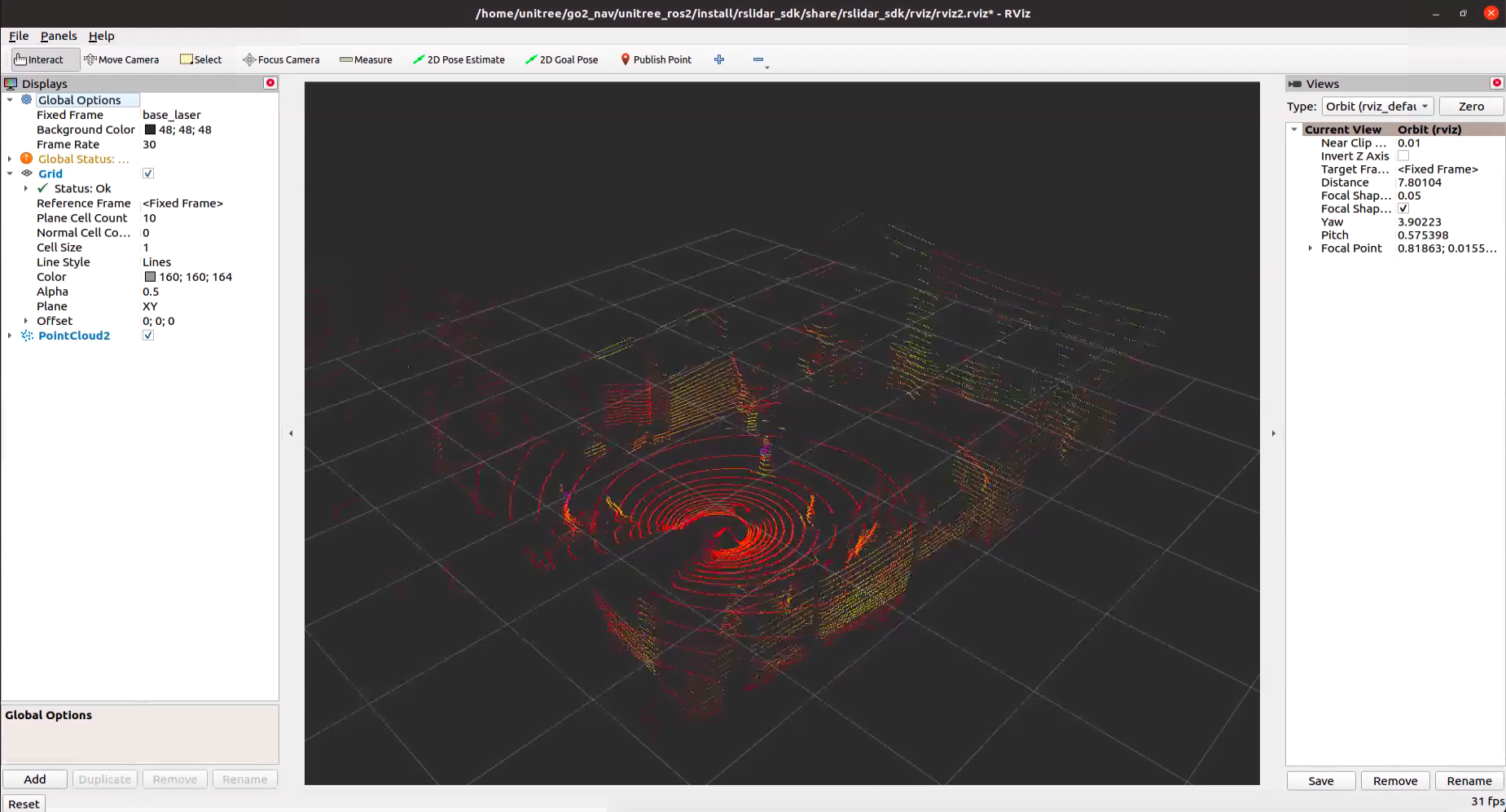
The first step involved integrating the Lidar sensor with ROS2. We utilized the RoboSense Lidar SDK from the official GitHub repository and installed it according to the instructions provided.
After successful implementation, we could visualize the 3D point cloud data in RViz:
The image below shows the 3D data publishing in rslidar topic:
For future integration steps, it’s important to note the frame_id and topics used by the SDK to publish 3D data:
ros:
ros_frame_id: base_laser # Frame id of packet message and point cloud message
ros_recv_packet_topic: /rslidar_packets # Topic used to receive lidar packets from ROS
ros_send_packet_topic: /rslidar_packets # Topic used to send lidar packets through ROS
ros_send_point_cloud_topic: /rslidar_points # Topic used to send point cloud through ROS
2. RTAB-Map Installation and Configuration
RTAB-Map is a graph-based SLAM approach that uses visual features for loop closure detection. We installed RTAB-Map on ROS2 following the official installation guide.
For those who want to learn more about RTAB-Map, the project’s website provides comprehensive documentation. To understand the available parameters and optimize RTAB-Map usage, the Parameters.h file is an excellent resource.
Using the topics and frames configured in the LiDAR SDK, we created a launch file to implement RTAB-Map in two modes:
- Localization Mode (
localize_only=true):- In this mode, the robot uses an already created map and does not update it with new sensor data.
- The
Mem/IncrementalMemoryparameter is set to false to prevent map updates.
- Mapping Mode (
localize_only=false):- In this mode, the robot builds a new map each time the node is launched.
- The
-dparameter can be used to reset any existing map, and theMem/IncrementalMemoryparameter is set to allow incremental map updates.
The launch file implements several important nodes:
icp_odometry- Uses the Iterative Closest Point (ICP) algorithm** to estimate the robot’s movement based on point cloud data.
- It subscribes to the LiDAR point cloud and publishes odometry information.
rtabmap- The main SLAM node that handles mapping and localization based on sensor data.
rtabmap_viz- Provides visualization of the SLAM process, including:
- The generated map
- Robot trajectory
- Feature matches
- Provides visualization of the SLAM process, including:
static_transform_publisher- Establishes the transformation between the base_link (robot base) and base_laser (LiDAR sensor).
- The
-0.2value in the z-axis accounts for the height difference between the robot’s base and the mounted LiDAR sensor.
The video below shows the succesful implementation of this launch file in the mapping mode:
3. SLAM with LiDAR and RGB-Camera Fusion
To improve mapping accuracy and enable automatic loop closure detection, we implemented a sensor fusion approach that combines LiDAR and RGB-D camera data.
- The RTAB-Map node is configured to subscribe to both RGB and depth images:
subscribe_depth: True subscribe_rgb: True - Camera topics are remapped to the actual topics published by the Intel RealSense camera.
- IMU data is incorporated for improved odometry estimation.
- The
-dargument is used to reset the map database when starting a new mapping session.
Note: the video in the overview section, is after running this launch file in mapping mode in the lab environment.
Future Work
This project lays the groundwork for several future developments:
This project publishes odomentry data on odom topic, and also updates the map. These steps are essential for the next step in implementing autonomous navigation using Nav2, enabling the robot to navigate to specified goals.
Code Repository
The complete code for this project is available in GitHub Repository
Acknowledgements
This work was inspired by projects of Nick Morales and Roy Rahul. Their publicly available projects and supports have been invaluable to the development of this project.